CS3481-Lecture-4-Classifier Evaluation
CS3481-Lecture-4-Classifier Evaluation
Classification error
The errors committed by a classification model are generally divided into two types
- Training errors
- Generalization errors
Training error is the number of misclassification errors committed on training records
Training error is also known as resubstitution error of apparent error.
Generalization error is the expected error of the model on previously unseen records.
A good classification model should
- Fit the training data well.
- Accurately classify reocrds it has never seen before.
A model that fits the training data too well can have a poor generaliztion error.
This is known as model overfitting
We consider the 2-D data set in the following figure.
The data set contains data points that belong to two different calsses.
10% of the points are chosen for training, while the remaining 90% are used for testing.
Decision tree calssifiers with different numbers of leaf nodes are built using the training set.

The following figure shows the training and test error rates of the decision tree.
Both error rates are large when the size of the tree is very small.
This situation is known as model underfitting.
Underfitting occurs because the model cannot learn the true structure of the data.
It performs poorly on both the training and test sets.
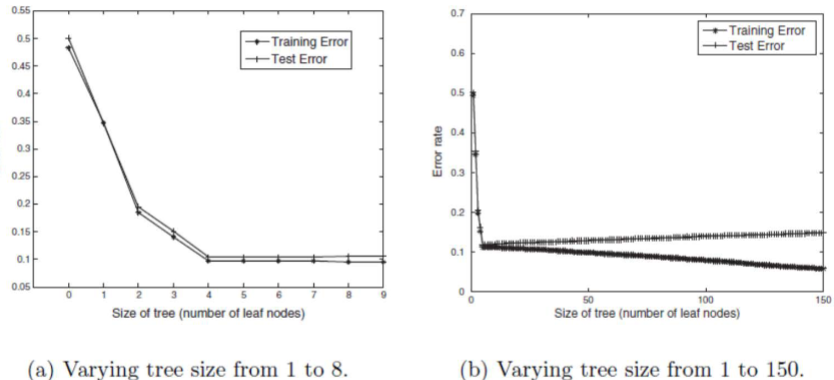
When the tree becomes too large
- The training error rate continues to decrease
- However, the test error rate begins to increase.
This pheonmenon is known as model overfitting
Overfitting
The training error can be reduced by increasing the model complexity
However, the test error can be large because the model may accidentally fit some of the noise point in the training data.
In ohter words, the performance of the model on the training set does not generalize well to the test examples.
We consider two decision treews, one with 5 leaf nodes and one with 50 leaf nodes.
The two decision trees and their corresponding decision boundaries are shown in the following figures.
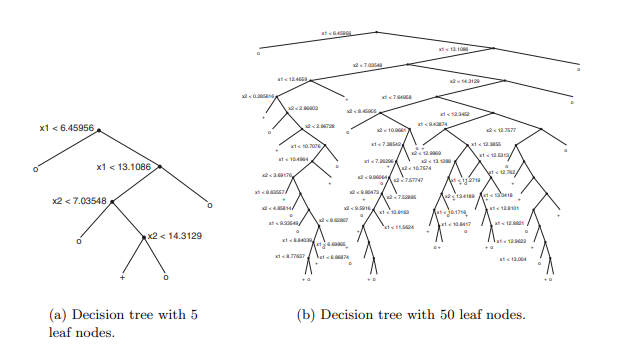
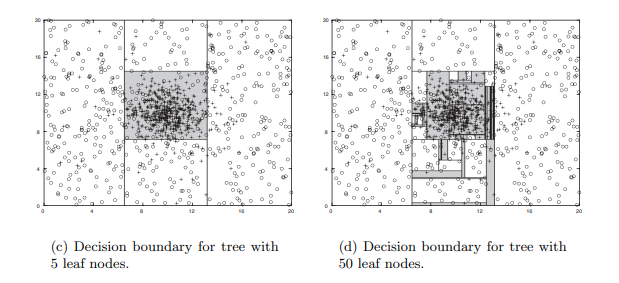
The decision boundaries constructed by the tree with 5 leaf nodes represent a reasonable approximation of the optimal solution.
It is expected that this set of decision boudnaries will result in a good classification performance on the test set.
On the other hand, the tree with 50 leaf nodes generates a set of complicated decision boundaries.
Some of the shaded regions corresponding to the ‘+’ class only contain a few ‘+’ training instances, among a large number of surrounding ‘o’ instance.
This excessive fine-tuning to specific patterns in the data will lead to unsatisfactory classification performance on the test set.
Generalization error estimation
The ideal classification model is the one that produeces the lowest generalization error.
The problem is that the model has no knowledge of the test set.
It has access only to the training set.
We consider the following approaches to estimate the generalization error
- Resubstitution estimate
- Estimates incorporating model complexity
- Using a validation set
Resubstitution estimate
The resubstitution estimate approach assumes that the training set is a good representation of the overall data
However, the training error is usually an optimistic estimate of the generalization error.
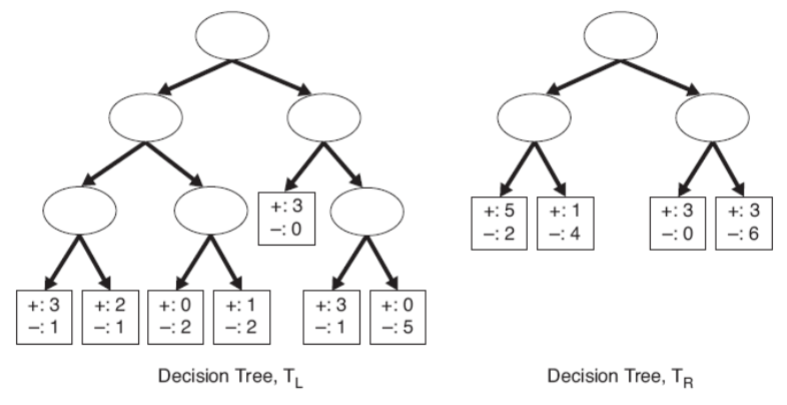
We consider the two decision trees shown in the following figure.
The left tree TL is more complex than the right tree TR.
The training error rate for TL is e(TL) = 4/24 = 0.167
The training error rate for TR is e(TR) = 6/25 = 0.24
Based on the resubsitution estimate, TL is considered better than TR.
Estimates incorporating model complexity
The chance for model overfitting increases as the model becomes more complex.
As a result, we should prefer simpler models
Based on this principle, we can estimate the generalization error as the sum of
- Training error and
- A penalty term for model complexity
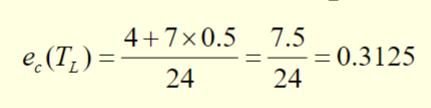
We consider the previous two decision trees TL and TR
We assume that the penalty term is equal to 0.5 for each leaf node.
The error rate estimate for TL is:
The error rate estimate for TR is:
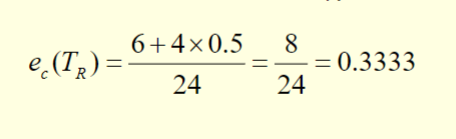
Based on this penalty term, TL is better than TR
For a binary tree, a penalty term of 0.5 means that a node should always be expanded into its two child nodes if it improves the classification of at least one training record.
This is bcecause expanding a node, which is the same as adding 0.5 to the overall error, is less costly than committing one training error.
Suppose the penalty term is equal to 1 for all the leaf nodes
The error rate estimate for TL becomes 0.458
The error rate estimate for TR becomes 0.417
So TR is better than TL
A penalty term of 1 measns that, for a binary tree, a node should not be expanded unless it reduces the classification error by more than one training record.
Using a validation set
- In this approach, the original training data is divided into two smaller subsets.
- One of the subsets is used for training
- Another one known as the validation set, is used for estimating the generalization error.
- This approach can be used in the case where the complexity of the model is determind by a parameter
- We can adjust the parameter until the resulting model attains the lowest error on the validation set.
- This approach provides a better way for estimating how well the model performs on previously unseen records.
- However, less data are available for training
Handling overfitting in decision tree
- There are two approaches for avoiding model overfitting in decision tree
- Pre-pruning
- Post-pruning
Pre-pruning
- In this approach, the tree growing algorithm is halted before generating a fully grown tree that perfectly fits the training data.
- To do this, an alternative stopping condition could be used
- For example, we can stop expanding a node when the observed change in impurity measure falls below a certain threshold.
- Advantage:
- avoids generating overly compelx sub-trees that overfit the training data
- However, it is difficult to choose the right threshold for the change in impurity measure.
- A threshold which is:
- too high will result in underfitted models
- too low may not be sufficient to overcome the model overfitting problem
Post-pruning
- In this approach, the decision tree is initially grown to its maximum size
- This is followed by a tree pruning step, which trims the fully grown tree.
- Trimming can be done by replacing a sub-tree with a new leaf node whose class label is determined from the majority class of records associated with the node
- The tree pruning step terminates when no further improvement is observed
- Post-pruning tends to give better results than pre-pruning because it makes pruning decisions based on a fully grown tree.
- On the other hand, pre-pruning can suffer from prematrue termination of the tree growing process.
- However, for post-pruning, the additional computations for growing the full tree may be wasted when some of the sub-trees are pruned.
Classifier evaluation
- There are a number of methods to evaluate the performance of a classifier
- Hold-out method
- Cross validation
Hold-out method
- In this method, the original data set is partitioned into two disjoint sets.
- These are called the training set and test set respectively.
- The classification model is constructed from the training set.
- The performance of the model is evaluted using the test set.
- The hold-out method has a number of well known limitations.
- First, fewer examples are available for training.
- Second, the model may be highly dependent on the composition of the training and test sets.
Cross validation
- In this approach, each record is used the same number of times ofr training, and exactly once for testing.
- To illustrate this method, suppose we partition the data into two equal-sized subsets.
- Frist, we choose one of the subsets for training and the other for testing
- We then swap the roles of the subsets so that the previous training set becomes the test set, and vice versa.
- The estimated error is obtained by averaging the errors on the test sets for both runs.
- In this example, eachrecord is used exactly once for training and once for testing.
- This approach is called two-fold cross-validation
- The k-fold cross validation method generalizes this approach by segmenting the data into k equal-sized partitions.
- During each run
- One for the partitions is chosen for testing
- The rest of them are used for training
- This procedure is repeated k times so that each partition is used for testing exactly once.
- The estimated error is obtained by averaging the errors on the test sets for all k runs.